

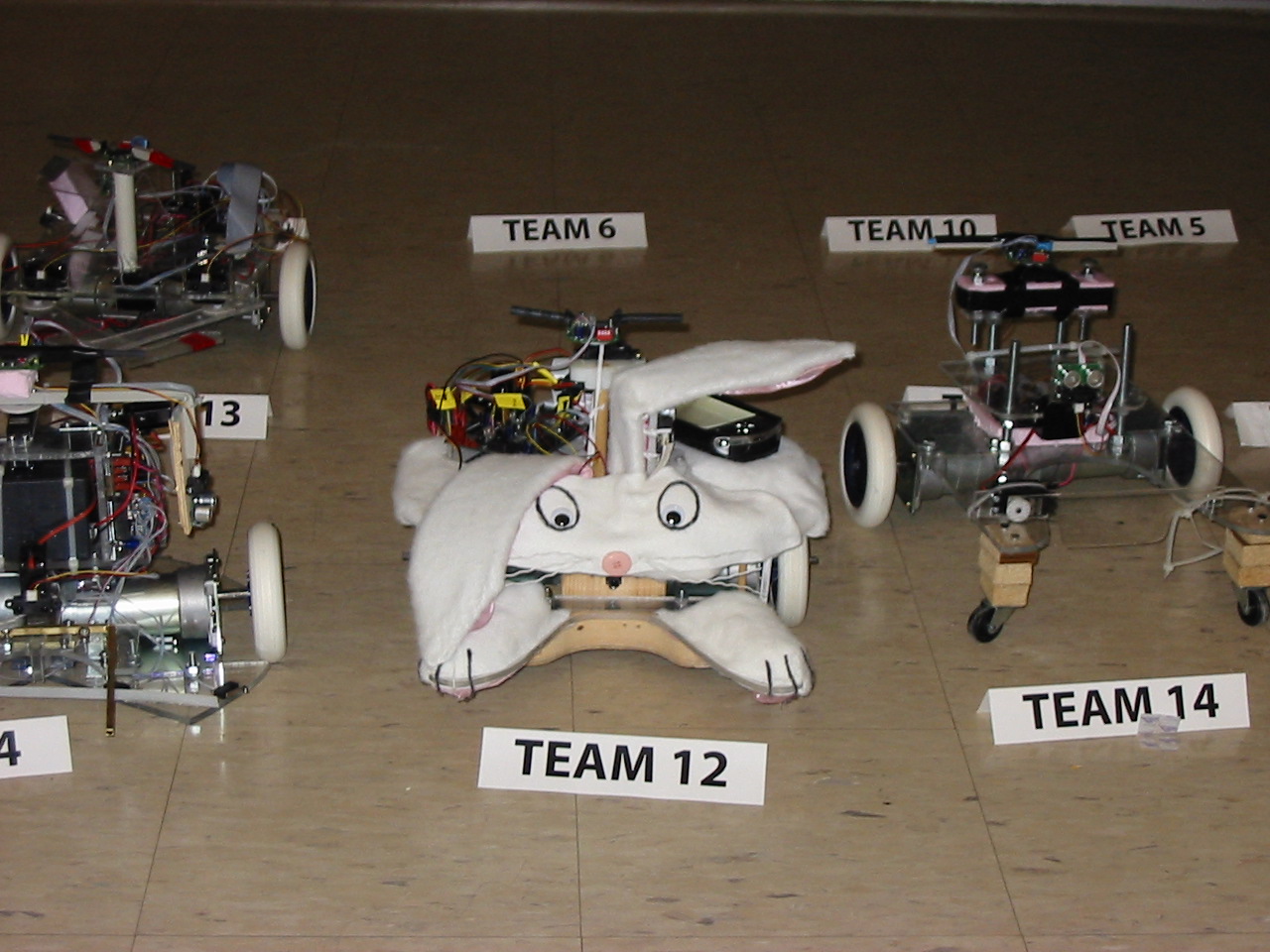  
The BunnyBot was created for MIT's MASLab, 6.186, autonomous robotics competition, where robots must navigate an unknown terrain and locate and retrieve IR beacons scattered on the field. As the only robot capable of retreiving multiple beacons, the BunnyBot demonstrated by far the best performance come exhibition time. Our success was due in equal parts to excellent mechanical design, ability to get Linux working on the IPAQ and well tested code. We are also proud that the BunnyBot far surpassed the competition in the important area of cosmetics. My primary contribution was design, construction and decoration of the chassis. The BunnyBot's front paws are hinged to capture the beacon rim when lifted like a drawbridge by a string and servo mounted under the floppy ear. The other ear houses and IR range finder and Sonar Sensor mounted on another servo, which rotates 180 degrees to scan the environment for obstacles, sort of like a real bunny. The IR receiver board used to locate the target beacons was mounted on a 3rd servo atop a mast in the center of the robot. The design was efficient, robust, and completed in the first week, allowing ample time to test code and for cosmetic touches. I also wrote code including navigation sub-routines for triangulating the BunnyBot's location and distance to the beacons, based on odometry and angle to the beacons. Collaborators: Jacinda Clemenzi, Stefanie Tellex, Zia Sobhani, Piotr Mitros.
|
|
