


 As a fun side project, Josh Pieper and I transformed this old
never-functional Heathkit HERO 1 into a modern day "SUPER"
HERO.
The HERO 1 robot was the cutting edge of consumer robotics in
the early 1980s. It is a classic in robotics. Equipped with a single
optical encoder on the drive (and steering motor), a phoneme based
speech chip, motion detection, sonar range finding and an arm with 6
degrees of freedom. It was an excellent mechanical platform begging
for some real intelligence.
As a fun side project, Josh Pieper and I transformed this old
never-functional Heathkit HERO 1 into a modern day "SUPER"
HERO.
The HERO 1 robot was the cutting edge of consumer robotics in
the early 1980s. It is a classic in robotics. Equipped with a single
optical encoder on the drive (and steering motor), a phoneme based
speech chip, motion detection, sonar range finding and an arm with 6
degrees of freedom. It was an excellent mechanical platform begging
for some real intelligence.
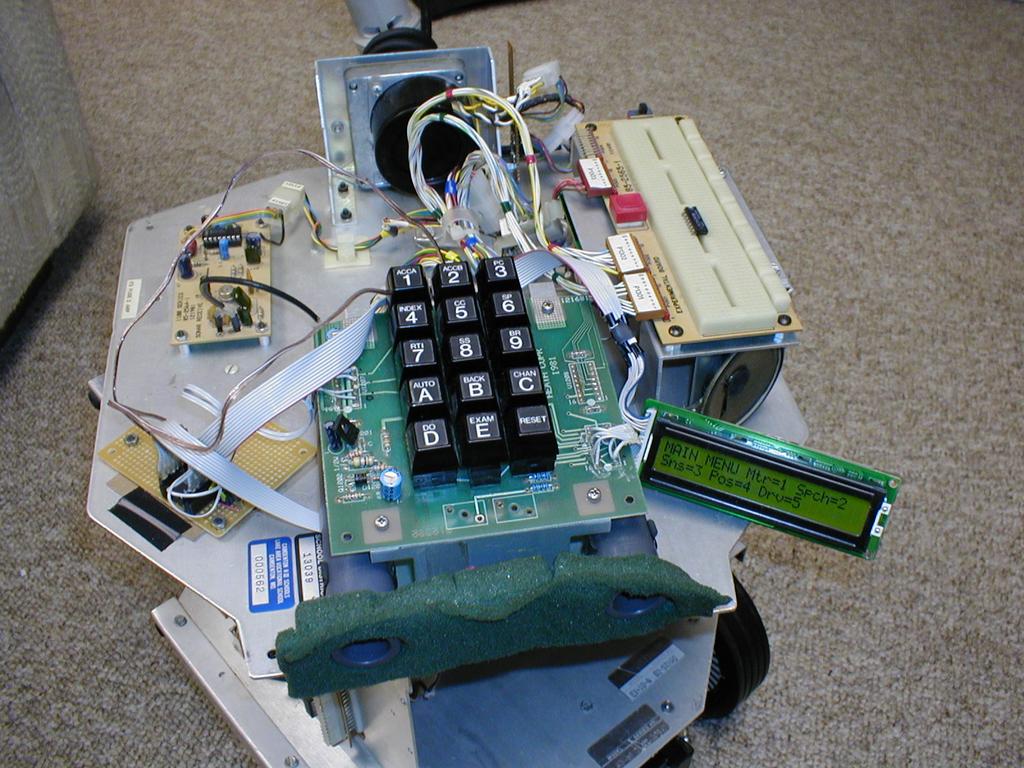
Our job began with fixing assembly defects and modularizing the phenomenally aweful original wiring mess (in which power wires were daisy chained such that *all* the wire bundles were one and motors were hard wired onto broken circuit boards). The fun parts of the restoration involved replacing the existing processor with a MEGA ATMEL microcontroller, which could be programed in C over a parallel port and communicate directly with a computer via a serial link. The hexadecimal keypad, previously used to painstakingly input machine code (which was saved to a tape cassette via an audio jack) was modified to navigate a menu system to input commands during operation. The original array of 7 segment displays was replaced with an LCD. Tiny ATMELs were networked on a serial bus to control the speech chip, read in distance measurements from new custom optical encoders, interface with the existing sonar range finding and motion detection, as well as the LCD and keypad. Some of the existing boards were replaced entirely, such as the speech board, and the others were reverse engineered enough to interface with. The I/O board was replaced with an array of chips on a parallel bus to control the 5 arm motors, head, steering and drive motors. Using the wheel optical encoders for feedback, we were able to make the HERO travel in a straight line, perhaps the first time for the species. :) As a culmination of this project I entered the SUPER HERO in the CMU mobot race, an autonomous race where the robots follow a line outdoors and get points for passing through gates. The gates, however, were only 18" tall, since the HERO is several inches bigger I had no choice but to pick up the gate. The HERO successfully picked up the first gate and set it down behind it, which wasn't worth any points, but won the judges choice prize for novelty and good effort. Working on the HERO was a great opportunity to play with the past and learn quite a bit more about circuits and microcontrollers. |
|
